publications
2025
-
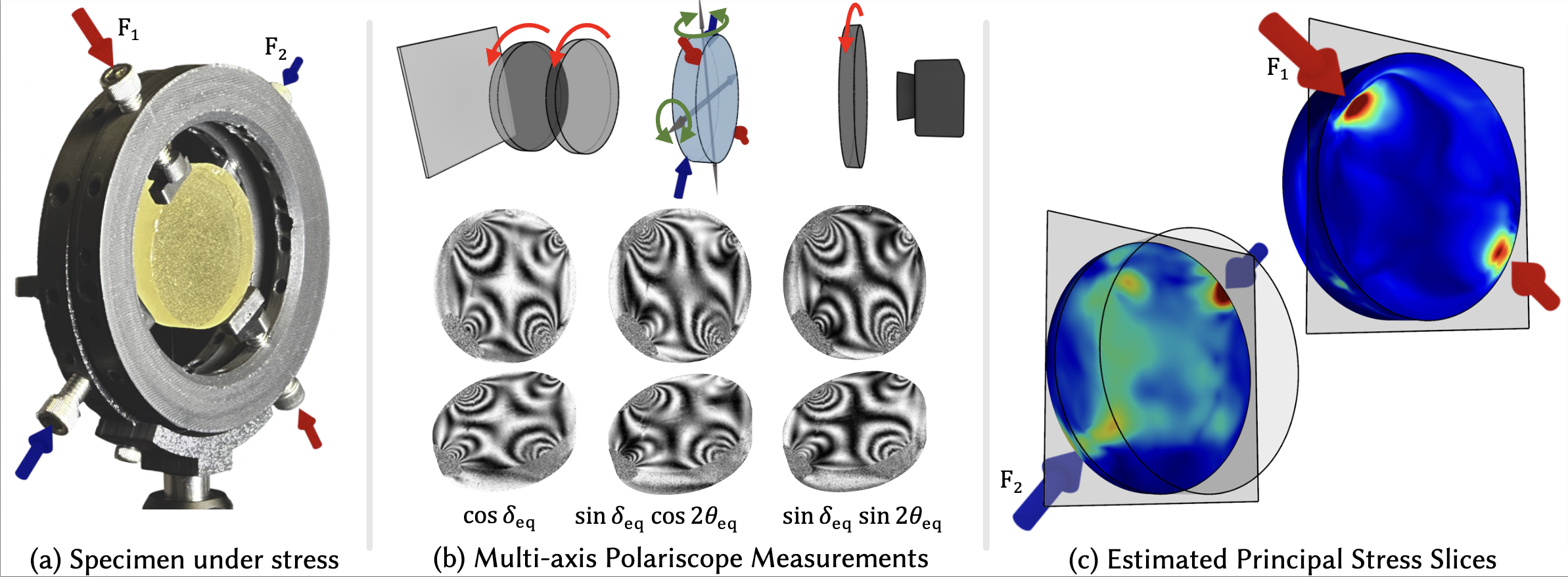 NeST: Neural Stress Tensor Tomography by leveraging 3D PhotoelasticityarXiv preprint arXiv:2406.10212, 2025Accepted to ACM Transactions on Graphics (TOG)
NeST: Neural Stress Tensor Tomography by leveraging 3D PhotoelasticityarXiv preprint arXiv:2406.10212, 2025Accepted to ACM Transactions on Graphics (TOG)




2024
-
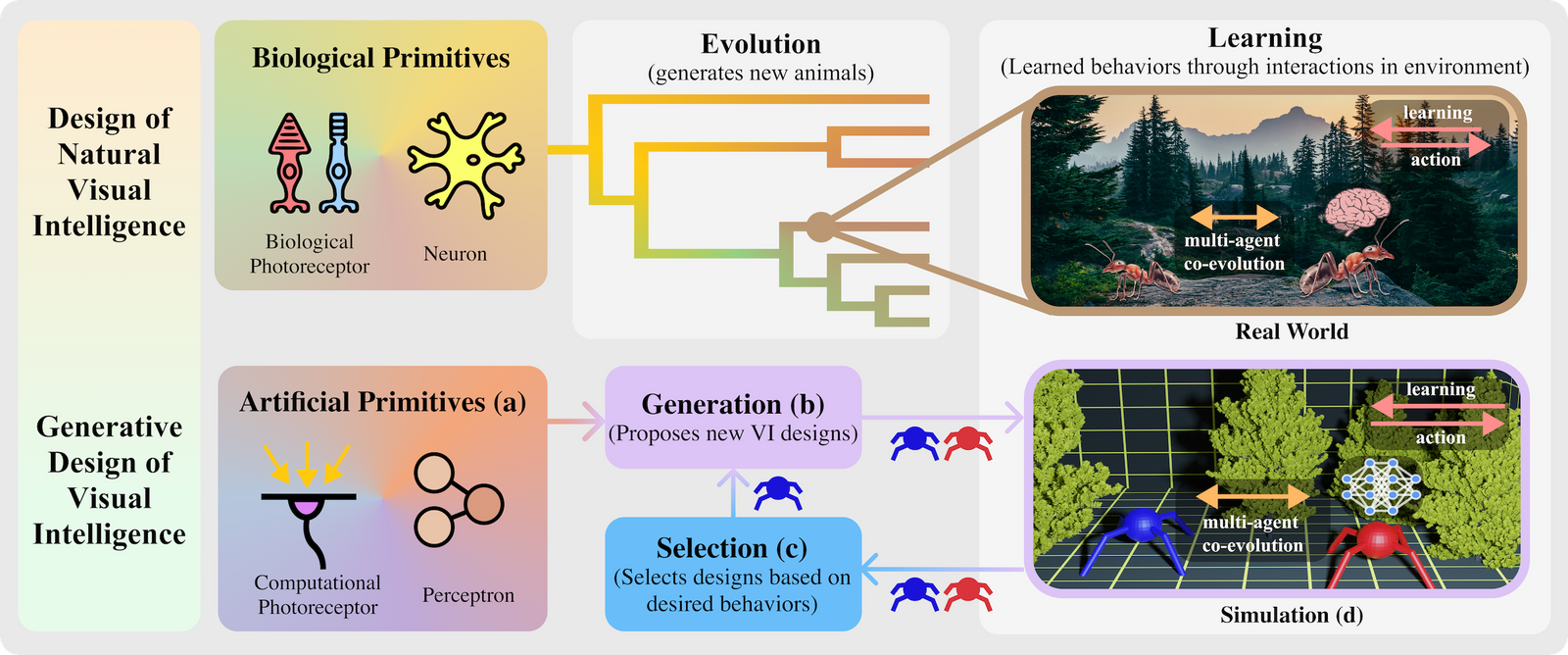 A Roadmap for Generative Design of Visual IntelligenceAn MIT Exploration of Generative AI, Sep 2024
A Roadmap for Generative Design of Visual IntelligenceAn MIT Exploration of Generative AI, Sep 2024 - A study on the use of simulation in synthesizing path-following control policies for autonomous ground robotsarXiv preprint arXiv:2403.18021, Sep 2024
- Quantifying the sim2real gap for GPS and IMU sensorsarXiv preprint arXiv:2403.11000, Sep 2024
- Rapid development of an autonomous vehicle for the SAE AutoDrive Challenge II competitionIn SAE Technical Paper Series, Sep 2024

2023
- An Overview of a Framework for Designing Robot Autonomy Stacks in SimulationSep 2023ECCOMAS Thematic Conference on Multibody Dynamics
- A Case Study in the Sim to Real Gap When Designing PID and MPC Controllers in SimulationSep 2023ECCOMAS Thematic Conference on Multibody Dynamics
2022
-
 Enabling Artificial Intelligence Studies in Off-Road Mobility Through Physics-Based Simulation of Multi-Agent ScenariosJournal of Computational and Nonlinear Dynamics, Sep 2022
Enabling Artificial Intelligence Studies in Off-Road Mobility Through Physics-Based Simulation of Multi-Agent ScenariosJournal of Computational and Nonlinear Dynamics, Sep 2022 - ART/ATK: A research platform for assessing and mitigating the sim-to-real gap in robotics and autonomous vehicle engineeringIn ArXiv, Sep 2022
-
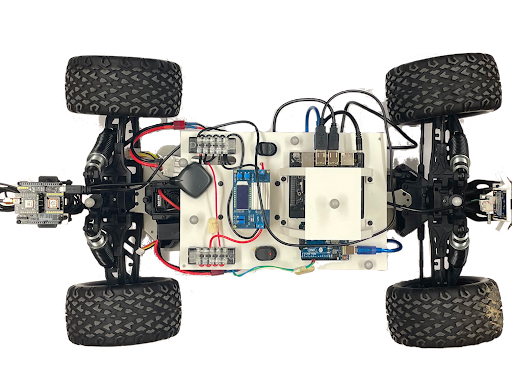 A software toolkit and hardware platform for investigating and comparing robot autonomy algorithms in simulation and realityIn , Sep 2022
A software toolkit and hardware platform for investigating and comparing robot autonomy algorithms in simulation and realityIn , Sep 2022 -
 A Geographically Distributed Simulation Framework for the Analysis of Mixed Traffic Scnearios Involving Conventional and Autonomous VehiclesIn SAE World Congress Experience - Occupant. Protection: Safety Test and Simulation Methods and Applications, Sep 2022
A Geographically Distributed Simulation Framework for the Analysis of Mixed Traffic Scnearios Involving Conventional and Autonomous VehiclesIn SAE World Congress Experience - Occupant. Protection: Safety Test and Simulation Methods and Applications, Sep 2022




2021
-
 End-to-end learning for off-road terrain navigation using the Chrono open-source simulation platformMultibody System Dynamics, Sep 2021
End-to-end learning for off-road terrain navigation using the Chrono open-source simulation platformMultibody System Dynamics, Sep 2021 - End-to-end learning for off-road, deformable terrain navigation using the Chrono open-source simulation platformIn International Society for Terrain-Vehicle Systems, Sep 2021
-
 PyChrono and Gym-Chrono: a Deep Reinforcement Learning framework leveraging Multibody Dynamics to control Autonomous Vehicles and RobotsIn International Nonlinear Dynamics Conference, Sep 2021
PyChrono and Gym-Chrono: a Deep Reinforcement Learning framework leveraging Multibody Dynamics to control Autonomous Vehicles and RobotsIn International Nonlinear Dynamics Conference, Sep 2021 - Enabling Artificial Intelligence Studies in Off-Road Mobility Through Physics-Based Simulation of Multi-Agent ScenariosSep 2021International Conference on Multibody Systems, Nonlinear Dynamics, and Control


2020
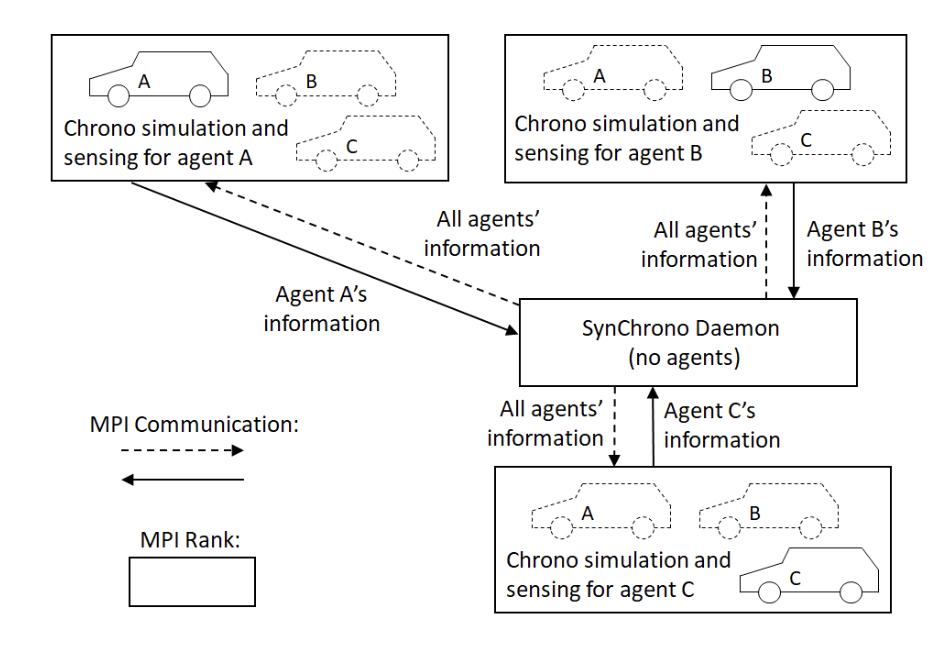
- Synchrono: A Scalable, Physics-Based Simulation Platform for Testing Groups of Autonomous Vehicles And/or RobotsIn International Conference on Multibody Systems, Nonlinear Dynamics, and Control, Sep 2020
- Enabling Artificial Intelligence Studies in Off-Road Mobility Through Physics-Based Simulation of Multi-Agent ScenariosIn NDIA Ground Vehicle Systems Engineering and Technology Symposium, Sep 2020
- SynChrono: An MPI-Based, Scalable Physics-Based Simulation Framework for Autonomous Vehicles Operating in Off-Road ConditionsIn ACM/IEEE Supercomputing Conference, Sep 2020
